
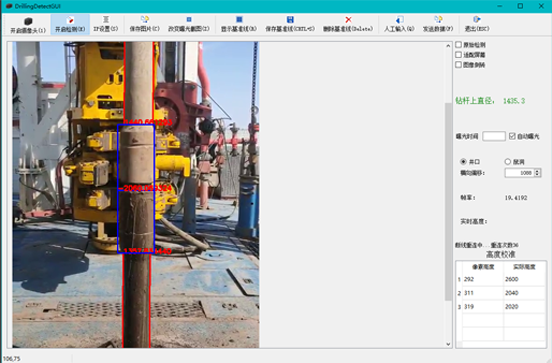
近年来,工业机械臂技术发展十分迅速,在石油领域方面的应用也日趋增加,由于仿真环境和真实环境存在偏差其绝对定位精度的控制非常重要。一般来说编程机械臂的绝对定位精度很低,有的甚至可达厘米数量级误差,在进行正常工作之前需要进行相应的标定来提高其精度。 该识别系统用来测量钻杆接缝距离地面的高度,可分别设置井口及鼠洞的横向位置进行测量。首次使用须进行高度校准。3米距离识别精度在1厘米以内误差。
应用场景
1.石油钻井行业
2.机械臂辅助焊接
3.低精度光刻机辅助切割
功能特色
1. 高精度定位:机械臂辅助定位系统具有高精度的位置控制能力,可以将工件或工具精确放置到所需的位置。
2. 多轴运动:系统通常具备多个轴的运动控制,可以实现复杂的三维运动,适用于各种应用场景。
3. 自动化操作:机械臂能够执行自动化操作,包括抓取、搬运、组装、焊接、切割等,减少人工劳动和提高生产效率。
4. 编程灵活性:系统支持编程,允许用户根据不同的生产需求编写和修改任务程序。
5. 视觉导航:一些系统配备视觉导航功能,能够通过摄像头或传感器感知工作环境,进行实时环境感知和调整。
6. 安全控制:机械臂辅助定位系统通常具有安全控制功能,可以检测障碍物和危险情况,并自动停止或调整操作,以确保操作员的安全。
7. 协作作业:一些系统支持协作机器人(协作机械臂)的使用,可以与人员共同工作,提高生产灵活性。
8. 远程监控:系统可以支持远程监控和操作,允许操作员远程访问机械臂,并实时监控生产线的状态。
9. 数据采集和分析:机械臂辅助定位系统可以采集操作数据,记录关键参数,以支持生产过程分析和改进。
10. 自动校准:系统通常具有自动校准功能,确保机械臂的运动精度和稳定性。
11. 灵活的末端工具:机械臂可以配备不同类型的末端工具,根据需要进行更换,适用于多种任务。
12. 智能化决策:一些系统具备人工智能和机器学习功能,能够根据环境和任务自主做出决策和调整。







 在线咨询
在线咨询

 电话咨询
电话咨询

 微信咨询
微信咨询
 回到顶部
回到顶部